
Ahhoz, hogy közlekedni tudjunk valahol – akár gyalog, akár járművel –, pontosan ismernünk kell környezetünket. Az ember érzékszerveire és korábbi tapasztalataira támaszkodva akár ismeretlen helyen is feltalálhatja magát több-kevesebb sikerrel. A számítógép által irányított járművek – és így a jövő robotautói – azonban nem rendelkeznek rutinnal. Ismeretlen helyen (legalábbis a tudomány jelenlegi állása szerint) nem tudnak „rögtönözni”. Ahhoz, hogy hatékonyan, balesetmentesen navigálhassanak a forgalomban, hajszálpontosan ismerniük kell mindent, amit csak a szenzoraikkal észlelnek. Ez pedig csak úgy lehetséges, ha megtanítjuk nekik.
Hogyan tanulnak a jövő robotautói?
A válasz: rendkívüli pontosságú navigációs térképek létrehozásával. Ezek a térképek a sávok vonalvezetését, a járdaszegély ívét, de még a táblák és közlekedési lámpák pontos pozícióját is tartalmazzák. Hatalmas adatmennyiséget jelent ez, aminek a begyűjtése és feldolgozása, valamint folyamatos karbantartása a hagyományos módszerekkel túlságosan hosszú időt vesz igénybe. A Toyota autonóm vezérlő szoftverek fejlesztésével foglalkozó kutató vállalata, a Toyota Research Institute-Advanced Development, Inc. (TRI-AD) azonban két olyan módszert is kidolgozott a jövő robotautó számára, amelyek felgyorsíthatják a folyamatot.
Az egyik eljárás során a normál személygépkocsikba beszerelt, vezetőtámogató funkciókat kiszolgáló kamerák felvételei, valamint műholdas képek alapján állítják össze a nagyfelbontású térképeket. A módszer előnye, hogy nem igényli külön térképészeti felmérő járművek használatát, az adatokat a forgalomban részt vevő autósok továbbítják a kutatóknak, egyfajta közösségi hozzájárulás (crowdsourcing) formájában. A másik technológia a TRI-AD automatizált térképkészítő platformjának (AMP) alkalmazása, amely más vállalatok térkép adatbázisainak gyors és hatékony feldolgozásában játszhat kulcsszerepet. Mindkét eljárástól azt várják a kutatók, hogy segítségükkel lerövidíthetők lesznek a frissítési késedelmek, felgyorsítható az új területek feltérképezése. Illetve csökkenthetők a térképek létrehozásának és karbantartásának költségei.
25 centis pontossággal térképeztek fel hét nagyvárost
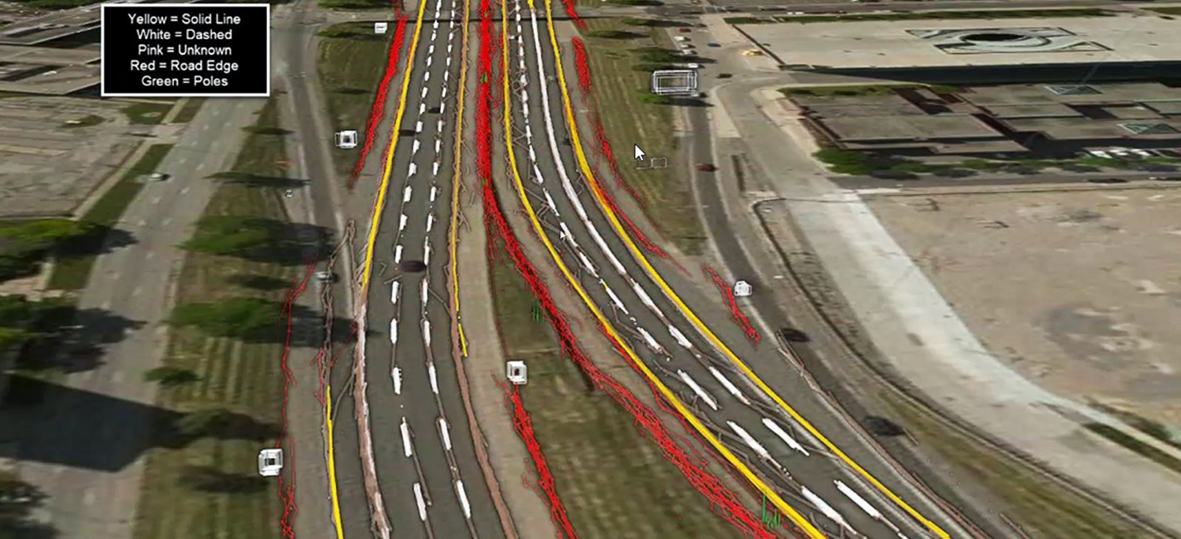
 A Toyota a földi és légi információs infrastruktúrák szakértőjével, a Maxar Technologies vállalattal, valamint az NTT DATA Corporation japán informatikai vállalattal együttműködve valósították meg a civil műholdakon keresztül elérhető legjobb felbontású képanyag HD térképekké konvertálását. A Toyota fejlett szoftvere képes volt a felvételeken azonosítani és eltávolítani az olyan redundáns részleteket, mint a járművek és árnyékok, illetve korrigálni az épületek által kitakart területeket. Eddig Tokió 23 kerületét, valamint a világ hat nagyvárosát – többek között Detroit, London, Szöul, San Francisco – térképezték fel 25 centiméteres pontossággal. Ez kétszer olyan precíz, mint az autonóm mobilitási rendszerek működéséhez szükséges felbontás. Egy ezzel párhuzamos együttműködésben a TRI-AD szoftverével és a Denso szenzoraival frissítették a Tom-Tom alsóbb rendű utakra vonatkozó, felhő alapú adatbázisát. A kísérletsorozat egy másik ágában a HERE helymeghatározó technológiai szolgáltató programját használták arra, hogy a TRI-AD autói által rögzített térképadatok lokációs pontatlanságait korrigálják.
A Toyota a földi és légi információs infrastruktúrák szakértőjével, a Maxar Technologies vállalattal, valamint az NTT DATA Corporation japán informatikai vállalattal együttműködve valósították meg a civil műholdakon keresztül elérhető legjobb felbontású képanyag HD térképekké konvertálását. A Toyota fejlett szoftvere képes volt a felvételeken azonosítani és eltávolítani az olyan redundáns részleteket, mint a járművek és árnyékok, illetve korrigálni az épületek által kitakart területeket. Eddig Tokió 23 kerületét, valamint a világ hat nagyvárosát – többek között Detroit, London, Szöul, San Francisco – térképezték fel 25 centiméteres pontossággal. Ez kétszer olyan precíz, mint az autonóm mobilitási rendszerek működéséhez szükséges felbontás. Egy ezzel párhuzamos együttműködésben a TRI-AD szoftverével és a Denso szenzoraival frissítették a Tom-Tom alsóbb rendű utakra vonatkozó, felhő alapú adatbázisát. A kísérletsorozat egy másik ágában a HERE helymeghatározó technológiai szolgáltató programját használták arra, hogy a TRI-AD autói által rögzített térképadatok lokációs pontatlanságait korrigálják.
Ennek köszönhetően a technológia kizárólag járműszenzorokból gyűjtött adatok alapján is képes sávpontosságú, nagyfelbontású térképeket összeállítani. Ezt középtávon a Toyota modelljei is használni fogják.
Fotók: Toyota, NTT DATA, Maxar Technologies





















